RTXI 3.0.0 The Real-Time eXperiment Interface Reference Manual |
RTXI 3.0.0 The Real-Time eXperiment Interface Reference Manual |
#include <rt.hpp>
Public Member Functions | |
| Thread (std::string n, const std::vector< IO::channel_t > &c) | |
| Thread (const Thread &connector)=default | |
| Thread & | operator= (const Thread &connector)=default |
| Thread (Thread &&)=delete | |
| Thread & | operator= (Thread &&)=delete |
| ~Thread () override=default | |
| virtual void | execute ()=0 |
 Public Member Functions inherited from IO::Block Public Member Functions inherited from IO::Block | |
| Block (std::string blockname, const std::vector< channel_t > &channels, bool isdependent) | |
| Block (const Block &block)=default | |
| Block & | operator= (const Block &block)=default |
| Block (Block &&)=delete | |
| Block & | operator= (Block &&)=delete |
| virtual | ~Block ()=default |
| std::string | getName () const |
| size_t | getCount (flags_t type) const |
| std::string | getChannelName (IO::flags_t type, size_t index) const |
| std::string | getChannelDescription (IO::flags_t type, size_t index) const |
| void | writeinput (size_t index, const double &data) |
| const double & | readPort (IO::flags_t direction, size_t index) |
| bool | dependent () const |
| bool | getActive () const |
| void | setActive (bool act) |
| void | assignID (size_t block_id) |
| size_t | getID () const |
Additional Inherited Members | |
| Protected Member Functions inherited from IO::Block | |
| double & | readinput (size_t index) |
| void | writeoutput (size_t index, const double &data) |
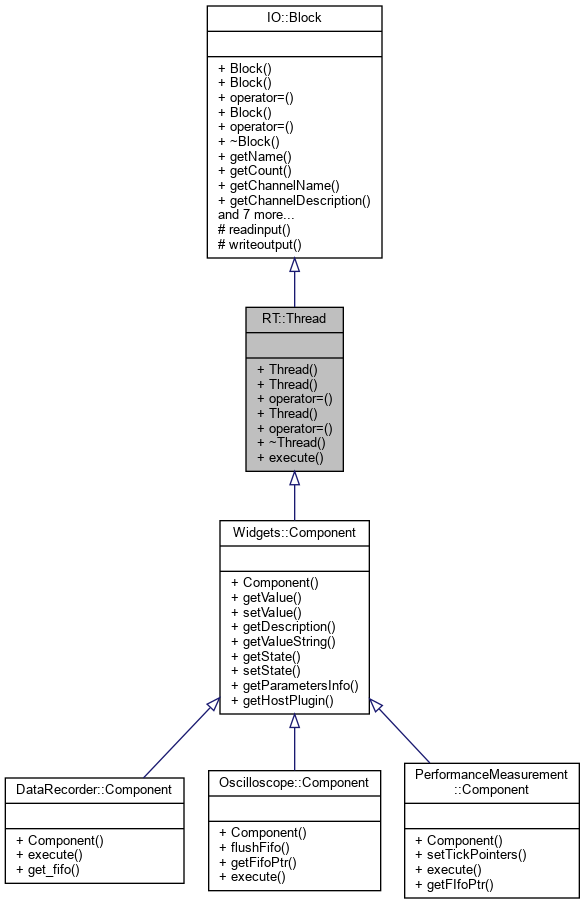
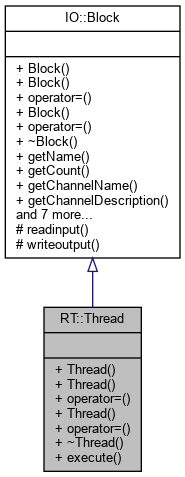
Base class for objects that are to interface with System.
Classes who inherit this base class are defined as blocks dependent of other blocks, and define thread interface method execute().
| inline |
| default |
| delete |
| overridedefault |
| pure virtual |
Function called periodically by the realtime task.
Implemented in PerformanceMeasurement::Component, Oscilloscope::Component, and DataRecorder::Component.